English
English Spanish
Spanish Arabic
Arabic French
French Portuguese
Portuguese Belarusian
Belarusian Japanese
Japanese Russian
Russian Malay
Malay Icelandic
Icelandic Bulgarian
Bulgarian Azerbaijani
Azerbaijani Estonian
Estonian Irish
Irish Polish
Polish Persian
Persian Boolean
Boolean Danish
Danish German
German Filipino
Filipino Finnish
Finnish Korean
Korean Dutch
Dutch Galician
Galician Catalan
Catalan Croatian
Croatian Latin
Latin Latvian
Latvian Romanian
Romanian Maltese
Maltese Macedonian
Macedonian Norwegian
Norwegian Swedish
Swedish Serbian
Serbian Slovak
Slovak Slovenian
Slovenian Swahili
Swahili Thai
Thai Turkish
Turkish Welsh
Welsh Urdu
Urdu Ukrainian
Ukrainian Greek
Greek Hungarian
Hungarian Italian
Italian Yiddish
Yiddish Indonesian
Indonesian Vietnamese
Vietnamese Haitian Creole
Haitian Creole Spanish Basque
Spanish Basque

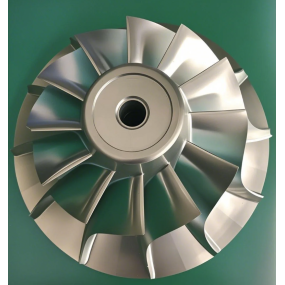
Úvod do vlastností obrábění přesných automatických soustruhů
 Přesný automatický soustruh je efektivní automatizovaný obráběcí stroj. Přesné automatické zpracování soustruhu se liší od běžného zpracování obráběcích strojů. Při obrábění dílů na přesném automatickém soustruhu jsou v procesu zpracování vyžadovány různé operace (jako je spuštění a zastavení vřetena, komutace a změna rychlosti, krmení obrobku nebo nástroje, výběr nástroje, přívod chladicí kapaliny atd.) a tvar a velikost dílů jsou zapsány do programů číslicového řízení podle specifikované metody kódování a vstup do zařízení číslicového řízení. Poté číselné řídicí zařízení zpracovává a vypočítává vstupní informace a řídí systém servo pohonu pro koordinaci pohybu souřadnicové osy tak, aby bylo možné realizovat relativní pohyb mezi nástrojem a obrobkem a dokončit zpracování dílů. Při změně obrobku, který má být opracován, je kromě opětovného upnutí obrobku a výměny nástroje vyžadován pouze náhradní program.
Přesný automatický soustruh je efektivní automatizovaný obráběcí stroj. Přesné automatické zpracování soustruhu se liší od běžného zpracování obráběcích strojů. Při obrábění dílů na přesném automatickém soustruhu jsou v procesu zpracování vyžadovány různé operace (jako je spuštění a zastavení vřetena, komutace a změna rychlosti, krmení obrobku nebo nástroje, výběr nástroje, přívod chladicí kapaliny atd.) a tvar a velikost dílů jsou zapsány do programů číslicového řízení podle specifikované metody kódování a vstup do zařízení číslicového řízení. Poté číselné řídicí zařízení zpracovává a vypočítává vstupní informace a řídí systém servo pohonu pro koordinaci pohybu souřadnicové osy tak, aby bylo možné realizovat relativní pohyb mezi nástrojem a obrobkem a dokončit zpracování dílů. Při změně obrobku, který má být opracován, je kromě opětovného upnutí obrobku a výměny nástroje vyžadován pouze náhradní program.
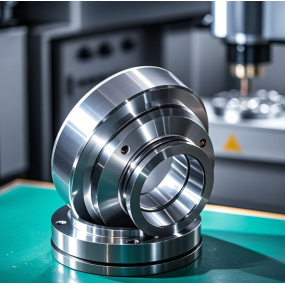
Přesné automatické soustruhy používají číslicová řídicí zařízení nebo elektronické počítače k úplnému nebo částečnému nahrazení různých akcí univerzálních obráběcích strojů při obrábění dílů, jako je spouštění, sekvence obrábění, změna dávkování řezání, změna rychlosti vřetena, výběr nástrojů, spuštění a zastavení chladicí kapaliny a parkování. Přesné automatické soustruhy jsou proto obráběcí stroje vybavené systémy číslicového řízení, které používají digitální signály k řízení pohybu obráběcího stroje a jeho procesu zpracování. Základním principem číslicového řízení je lineární interpolace, což je výpočet souřadnicových hodnot několika mezilehlých bodů mezi počátečními a koncovými body pohybu nástroje podle požadavků rychlosti posuvu.
V současné době, v multi-souřadnicovém linkage numerickém řídicím systému, nejrozsáhlejší lineární interpolační algoritmus je vzorkování dat interpolační algoritmus, který se vyznačuje interpolační operace je dokončena ve dvou krocích. Prvním krokem je hrubá interpolace, která je vložit několik kontrolních bodů nožem mezi spoje daného počátečního kontrolního bodu nože, to znamená, že pro každou souřadnici pohybu se používá několik malých posunů přiblížit, a délka každého malého posunu je rovna Delta L a souvisí s danou rychlost posuvu. Hrubá interpolace se vypočítá pouze jednou v každém cyklu interpolace a délka každého malého posunu se vztahuje k deltě L a dané rychlosti posuvu F a interpolačnímu období T, tj. Delta L = FT. Druhým krokem je jemná interpolace, která se provádí "zhušťování datových bodů" na každém malém posunu vypočítaném hrubou interpolací. Hrubá interpolace vypočítá hodnotu přírůstku souřadnicové polohy v každém cyklu interpolace, zatímco jemná interpolace vypočítá hodnotu přírůstku vzorkovací polohy a hodnotu přírůstkové polohy interpolačního výstupu v každém cyklu odběru vzorků a poté vypočítá odpovídající polohu interpolačního pokynu a skutečnou polohu zpětné vazby každé souřadnicové osy a porovná dvě, aby získala chybu následování. Podle získané chyby se vypočítá instrukce rychlosti posuvu odpovídající osy a výstup do pohonného zařízení. Interpolační perioda může být obvykle celočíselným násobkem vzorkovací periody.