English
English Arabic
Arabic French
French Portuguese
Portuguese Belarusian
Belarusian Japanese
Japanese Russian
Russian Malay
Malay Icelandic
Icelandic Bulgarian
Bulgarian Azerbaijani
Azerbaijani Estonian
Estonian Irish
Irish Polish
Polish Persian
Persian Boolean
Boolean Danish
Danish German
German Filipino
Filipino Finnish
Finnish Korean
Korean Dutch
Dutch Galician
Galician Catalan
Catalan Czech
Czech Croatian
Croatian Latin
Latin Latvian
Latvian Romanian
Romanian Maltese
Maltese Macedonian
Macedonian Norwegian
Norwegian Swedish
Swedish Serbian
Serbian Slovak
Slovak Slovenian
Slovenian Swahili
Swahili Thai
Thai Turkish
Turkish Welsh
Welsh Urdu
Urdu Ukrainian
Ukrainian Greek
Greek Hungarian
Hungarian Italian
Italian Yiddish
Yiddish Indonesian
Indonesian Vietnamese
Vietnamese Haitian Creole
Haitian Creole Spanish Basque
Spanish Basque

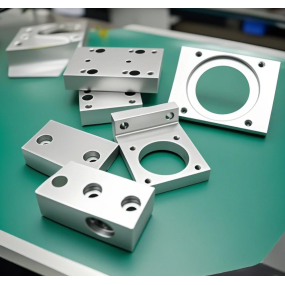
Introducción a las características de mecanizado de tornos automáticos de precisión
 El torno automático de precisión es una máquina herramienta automatizada eficiente. El procesamiento automático de precisión del torno es diferente del procesamiento ordinario de la máquina herramienta. Al mecanizar piezas en un torno automático de precisión, se requieren varias operaciones en el proceso de procesamiento (como el arranque y la parada del husillo, la conmutación y el cambio de velocidad, la alimentación de la pieza de trabajo o herramienta, la selección de herramientas, el suministro de refrigerante, etc.) y la forma y el tamaño de las piezas se escriben en programas de procesamiento de control numérico de acuerdo con el método de codificación especificado, y la entrada en el dispositivo de control numérico. Luego, el dispositivo de control numérico procesa y calcula la información de entrada, y controla el sistema de servoaccionamiento para coordinar el movimiento del eje de coordenadas, a fin de realizar el movimiento relativo entre la herramienta y la pieza de trabajo y completar el procesamiento de las piezas. Cuando se cambia la pieza de trabajo a mecanizar, además de volver a sujetar la pieza de trabajo y cambiar la herramienta, solo se requiere el programa de reemplazo.
El torno automático de precisión es una máquina herramienta automatizada eficiente. El procesamiento automático de precisión del torno es diferente del procesamiento ordinario de la máquina herramienta. Al mecanizar piezas en un torno automático de precisión, se requieren varias operaciones en el proceso de procesamiento (como el arranque y la parada del husillo, la conmutación y el cambio de velocidad, la alimentación de la pieza de trabajo o herramienta, la selección de herramientas, el suministro de refrigerante, etc.) y la forma y el tamaño de las piezas se escriben en programas de procesamiento de control numérico de acuerdo con el método de codificación especificado, y la entrada en el dispositivo de control numérico. Luego, el dispositivo de control numérico procesa y calcula la información de entrada, y controla el sistema de servoaccionamiento para coordinar el movimiento del eje de coordenadas, a fin de realizar el movimiento relativo entre la herramienta y la pieza de trabajo y completar el procesamiento de las piezas. Cuando se cambia la pieza de trabajo a mecanizar, además de volver a sujetar la pieza de trabajo y cambiar la herramienta, solo se requiere el programa de reemplazo.
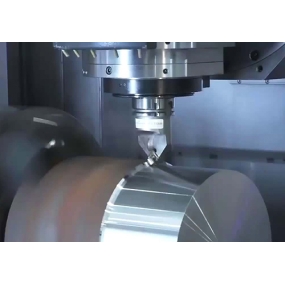
Los tornos automáticos de precisión utilizan dispositivos de control numérico o ordenadores electrónicos para sustituir total o parcialmente diversas acciones de las máquinas herramienta de uso general al mecanizar piezas, como el arranque, la secuencia de mecanizado, el cambio de dosificación de corte, el cambio de velocidad del husillo, la selección de herramientas, el arranque y parada del refrigerante y el estacionamiento. Por lo tanto, los tornos automáticos de precisión son máquinas herramienta dotadas de con sistemas de control numérico, que utilizan señales digitales para controlar el movimiento de la máquina herramienta y su proceso de procesamiento. El principio básico del control numérico es la interpolación lineal, que consiste en calcular los valores de coordenadas de varios puntos intermedios entre los puntos de inicio y final del movimiento de la herramienta según los requisitos de la velocidad de alimentación.
En la actualidad, en el sistema de control numérico de enlace de múltiples coordenadas, el algoritmo de interpolación lineal más extenso es el algoritmo de interpolación de muestreo de datos, que se caracteriza por que la operación de interpolación se completa en dos pasos. El primer paso es la interpolación gruesa, que consiste en insertar varios puntos de verificación de cuchilla entre las conexiones de un punto de verificación de cuchilla de partida dado, es decir, para cada coordenada de movimiento, se utilizan varios pequeños desplazamientos para aproximar, y la longitud de cada pequeño desplazamiento es igual a Delta L y está relacionada con la velocidad de alimentación dada. La interpolación gruesa se calcula una sola vez en cada ciclo de operación de interpolación, y la longitud de cada pequeño desplazamiento está relacionada con Delta L y la velocidad de avance F dada y el período de interpolación T, es decir, Delta L = FT. El segundo paso es la interpolación fina, que consiste en hacer "densificación de puntos de datos" en cada pequeño desplazamiento calculado por interpolación aproximada. La interpolación gruesa calcula el valor de aumento de posición de coordenadas en cada ciclo de interpolación, mientras que la interpolación fina calcula el valor de aumento de posición de muestreo y el valor de aumento de posición de instrucción de salida de interpolación en cada ciclo de muestreo, y luego calcula la posición de instrucción de interpolación correspondiente y la posición de retroalimentación real de cada eje de coordenadas, y compara los dos para obtener el error de seguimiento. De acuerdo con el error de seguimiento obtenido, se calcula la instrucción de velocidad de alimentación del eje correspondiente y se envía al dispositivo de accionamiento. Por lo general, el período de interpolación puede ser un número entero múltiple del período de muestreo.