English
English Spanish
Spanish Arabic
Arabic French
French Portuguese
Portuguese Belarusian
Belarusian Japanese
Japanese Russian
Russian Malay
Malay Icelandic
Icelandic Bulgarian
Bulgarian Azerbaijani
Azerbaijani Estonian
Estonian Irish
Irish Polish
Polish Persian
Persian Boolean
Boolean Danish
Danish German
German Filipino
Filipino Finnish
Finnish Korean
Korean Dutch
Dutch Catalan
Catalan Czech
Czech Croatian
Croatian Latin
Latin Latvian
Latvian Romanian
Romanian Maltese
Maltese Macedonian
Macedonian Norwegian
Norwegian Swedish
Swedish Serbian
Serbian Slovak
Slovak Slovenian
Slovenian Swahili
Swahili Thai
Thai Turkish
Turkish Welsh
Welsh Urdu
Urdu Ukrainian
Ukrainian Greek
Greek Hungarian
Hungarian Italian
Italian Yiddish
Yiddish Indonesian
Indonesian Vietnamese
Vietnamese Haitian Creole
Haitian Creole Spanish Basque
Spanish Basque

O método é tan simple como iso, pero o valor é enorme. A chave é se o valora ou non!
Isto é só un dos métodos, hai moitos métodos máis que Jun Ge vos ensinará máis tarde.
Debuxar un diagram a de rota de ferramentas é un método de enxeñaría inversa, e o tipo de rota de ferramentas determinará como escribir o programa máis tarde.
Por exemplo, mostrarase abaixo o diagrama da rota de corte de fíos serrado, con diferentes ángulos dentais en ambos os lados.
Por exemplo, o diagrama da rota da ferramenta para o fío TR en baixo, con ferramentas emprestadas en ambos os lados
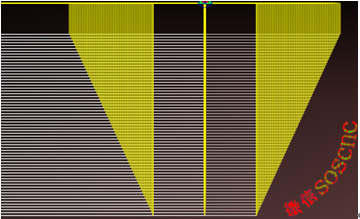
O artigo de hoxe falará de macroprogramación para fíos en forma de T

Como se mostra no diagrama anterior da rota do coitelo: Vehículo con capa, tres coitelos por capa, isto é, primeiro o medio, e despois os coitelos emprestados á esquerda e á dereita de ambos lados
Ampliar o diagrama da rota do coitelo como se mostra na figura seguinte:
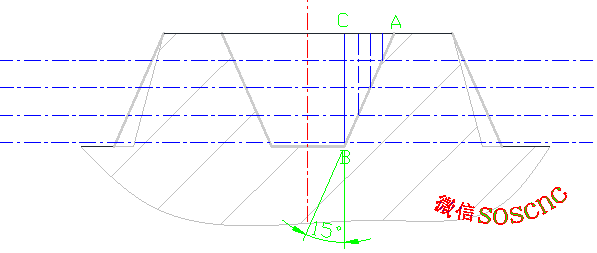
In this way, everyone can intuitively see that as the cutting depth deepens, the tool needs to move along the AB line, so that the borrowed tool comes out with the required thread profile.
Noutras palabras, hai unha relación entre a profundidade do coitelo X e o tamaño na dirección Z, que satisface a lei pitágora, isto é, TAN15=AC/BC
Podemos deducir: AC=TAN15 * BC
Esta relación é moi importante. Na programación posterior, a medida que a profundidade de corte BC cambia, a AC tamén cambia de acordo con esta relación, procesando as í a forma do perfil de fíos tipo Tr.
Así que a forma do contorno de Tr non significa necesariamente que os fíos Tr poidan ser procesados satisfactoriamente.
Porque tamén hai que considerar ferramentas de corte durante o procesamento.
Porque cada fío de tipo Tr ten un tamaño dental específico.
Por exemplo, o ancho da lâmina escollida é de 2 mm (para as lâminas emprestadas á esquerda e á dereita, o ancho da lâmina precisa ser menor que o ancho básico dos dentes)
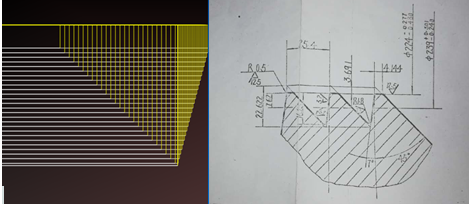
Por exemplo, o fío externo TR100 * 12, as dimensións relevantes son as seguintes:
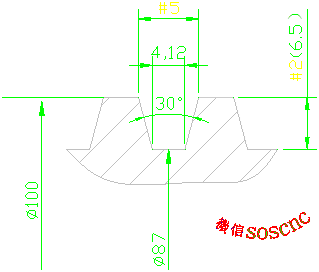
Podo configurar calquera número de variábeis como se mostra na figura anterior
# 2 representa a altura dos dentes, que é a profundidade da incisión
# 5 representa o ancho total dos dentes, que é o tamaño do perfil de fíos que precisamos procesar
# 5= 4, 12+2* TAN[ 15] *# 2
Dado que as ferramentas de corte tamén teñen un ancho, o ancho real da cavidade alveolar debería ser:
Ancho base de dentes+2 x ancho da inclinación - ancho da ferramenta.
Así que o final # 5=4, 12+2 * TAN [15] * # 2- 2 (incluindo o ancho da ferramenta)
Está ben, iso é todo para a análise.
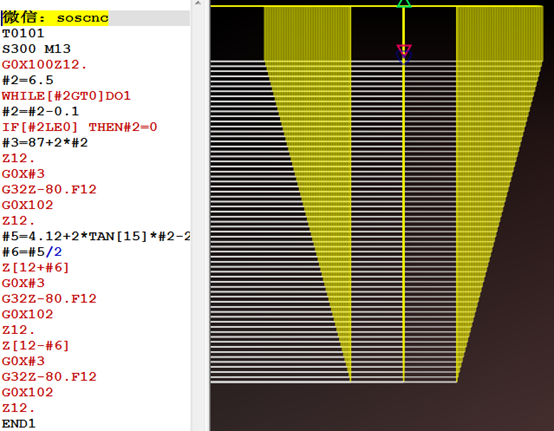
T0101
S300 M13
G0X100Z12. (Moverse rápido ao punto de inicio do fío)
# 2=6, 5 (asignación inicial da altura dos dentes)
WHILE [# 2GT0] DO1 (Se a altura do dente non chegou a 0, significa que o tamaño do diámetro base do fío aínda non foi alcanzado)
# 2= # 2- 0. 1 (cantidade de corte, 0. 1 por capa de vehículo, valor unilateral)
Se [# 2LE0] Entón # 2=0
# 3=87+2 * # 2
Z12. (Z12 é a referencia de posición, e os puntos de partida dos coitelos emprestados á esquerda e á dereita no programa seguinte están todos baseados en Z12)
G0X # 3 (corte cara baixo en dirección X)
G32Z-80.F12 (corte de fíos)
G0X102 (retracción)
Z12. (Folla de retorno)
# 5=4, 12+2 * TAN [15] * # 2- 2 (O ancho dos dentes correspondente á altura actual dos dentes é a base para emprestar coitelos nos dous lados máis tarde)
5/2 (dado que ambos os lados emprestan o coitelo, dividen 5 por 2 e dividen igualmente)
Z [12+# 6] (Primeiro emprestar un coitelo do lado dereito, engadir # 6 porque o coitelo precisa moverse á dereita)
G0X#3
G32Z-80.F12
G0X102
Z12.
Z [12 - # 6] (Primeiro emprestar un coitelo da esquerda, subtrair # 6 porque a ferramenta precisa moverse á esquerda)
G0X#3
G32Z-80.F12
G0X102
Z12.
END1
G0X200.
Z200.
M30