English
English Spanish
Spanish Arabic
Arabic French
French Portuguese
Portuguese Belarusian
Belarusian Japanese
Japanese Russian
Russian Malay
Malay Icelandic
Icelandic Bulgarian
Bulgarian Azerbaijani
Azerbaijani Estonian
Estonian Irish
Irish Persian
Persian Boolean
Boolean Danish
Danish German
German Filipino
Filipino Finnish
Finnish Korean
Korean Dutch
Dutch Galician
Galician Catalan
Catalan Czech
Czech Croatian
Croatian Latin
Latin Latvian
Latvian Romanian
Romanian Maltese
Maltese Macedonian
Macedonian Norwegian
Norwegian Swedish
Swedish Serbian
Serbian Slovak
Slovak Slovenian
Slovenian Swahili
Swahili Thai
Thai Turkish
Turkish Welsh
Welsh Urdu
Urdu Ukrainian
Ukrainian Greek
Greek Hungarian
Hungarian Italian
Italian Yiddish
Yiddish Indonesian
Indonesian Vietnamese
Vietnamese Haitian Creole
Haitian Creole Spanish Basque
Spanish Basque

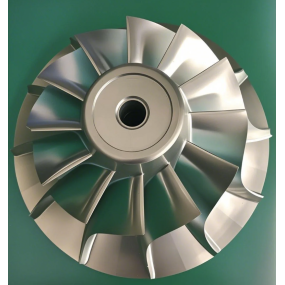
Zwykłe tokarki pionowe mogą sprostać cięciu zwykłych powierzchni czołowych i okręgów zewnętrznych, ale nie nadają się do obróbki części zakrzywionych. Obróbka zakrzywionych części wymaga najpierw zaprojektowania i wykonania oprzyrządowania zgodnie z wymaganiami części, a następnie użycia oprzyrządowania do obróbki, co powoduje wysokie koszty produkcji, słabą adaptacyjność produktu i długie cykle przetwarzania. Zgodnie z charakterystyką strukturalną tokarek pionowych, poprzez analizę wykonalności technicznej i ekonomicznej, całkowicie cyfrową transformację regulacji prędkości DC głównego układu napędowego obrabiarki, transformację sterowania numerycznego systemu podawania lewego uchwytu narzędzia oraz projektowanie i debugowanie elektrycznego układu sterowania numerycznego są specjalnie realizowane.
1. Całkowicie cyfrowa transformacja sterowania prędkością DC głównego układu przeniesienia napędu wykorzystuje w pełni cyfrowy regulator prądu stałego British Continental 590 ~ + i na podstawie zachowania oryginalnego mechanizmu skrzyni biegów, oryginalną hydrauliczną 16-poziomową ręczną skrzynię biegów obrabiarki narzędzie jest przekształcone w hydrauliczną 4-poziomową bezstopniową regulację prędkości. Treść transformacji obejmuje wybór schematu sterowania prędkością i silnika, regulację głównej trasy transmisji oraz projekt obwodu sterującego regulatora prądu stałego i programu sterującego PLC.
2. Transformacja sterowania numerycznego układu podawania lewego uchwytu narzędzia wykorzystuje śrubę kulową do zastąpienia oryginalnej śruby ślizgowej i sterowania w pętli półzamkniętej. Treść transformacji obejmuje wybór trybu sterowania układu posuwu serwo, określenie planu transformacji części mechanicznej układu posuwu; obliczanie parametrów i dobór pary śrub kulowych i silnika serwo;
3, system sterowania numerycznego SINUMERIK 802D skutecznie realizuje sterowanie połączeniem osi X i osi Z lewego uchwytu narzędzia, zawartość projektowa elektrycznego systemu sterowania numerycznego obejmuje głównie skład i połączenie elektrycznego systemu sterowania numerycznego oraz projektowanie i debugowanie programu PLC w systemie sterowania numerycznego