English
English Spanish
Spanish Arabic
Arabic French
French Belarusian
Belarusian Japanese
Japanese Russian
Russian Malay
Malay Icelandic
Icelandic Bulgarian
Bulgarian Azerbaijani
Azerbaijani Estonian
Estonian Irish
Irish Polish
Polish Persian
Persian Boolean
Boolean Danish
Danish German
German Filipino
Filipino Finnish
Finnish Korean
Korean Dutch
Dutch Galician
Galician Catalan
Catalan Czech
Czech Croatian
Croatian Latin
Latin Latvian
Latvian Romanian
Romanian Maltese
Maltese Macedonian
Macedonian Norwegian
Norwegian Swedish
Swedish Serbian
Serbian Slovak
Slovak Slovenian
Slovenian Swahili
Swahili Thai
Thai Turkish
Turkish Welsh
Welsh Urdu
Urdu Ukrainian
Ukrainian Greek
Greek Hungarian
Hungarian Italian
Italian Yiddish
Yiddish Indonesian
Indonesian Vietnamese
Vietnamese Haitian Creole
Haitian Creole Spanish Basque
Spanish Basque

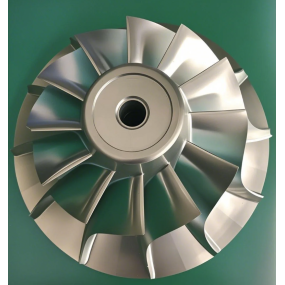
Introdução às características de usinagem de tornos automáticos de precisão
 O torno automático de precisão é uma máquina-ferramenta automatizada eficiente. O processamento automático do torno de precisão é diferente do processamento normal de máquinas-ferramenta. Ao usinar peças em um torno automático de precisão, várias operações necessárias no processo de processamento (como partida e parada do fuso, comutação e mudança de velocidade, alimentação da peça de trabalho ou ferramenta, seleção de ferramentas, fornecimento de refrigerante, etc.) e a forma e o tamanho das peças são escritos em programas de processamento de controle numérico de acordo com o método de codificação especificado e entrada no dispositivo de controle numérico. Em seguida, o dispositivo de controle numérico processa e calcula as informações de entrada e controla o sistema de servo-acionamento para coordenar o movimento do eixo de coordenadas, de modo a perceber o movimento relativo entre a ferramenta e a peça de trabalho e concluir o processamento das peças. Quando a peça a ser usinada é trocada, além de recolocar a peça e trocar a ferramenta, apenas o programa de substituição é necessário.
O torno automático de precisão é uma máquina-ferramenta automatizada eficiente. O processamento automático do torno de precisão é diferente do processamento normal de máquinas-ferramenta. Ao usinar peças em um torno automático de precisão, várias operações necessárias no processo de processamento (como partida e parada do fuso, comutação e mudança de velocidade, alimentação da peça de trabalho ou ferramenta, seleção de ferramentas, fornecimento de refrigerante, etc.) e a forma e o tamanho das peças são escritos em programas de processamento de controle numérico de acordo com o método de codificação especificado e entrada no dispositivo de controle numérico. Em seguida, o dispositivo de controle numérico processa e calcula as informações de entrada e controla o sistema de servo-acionamento para coordenar o movimento do eixo de coordenadas, de modo a perceber o movimento relativo entre a ferramenta e a peça de trabalho e concluir o processamento das peças. Quando a peça a ser usinada é trocada, além de recolocar a peça e trocar a ferramenta, apenas o programa de substituição é necessário.
Tornos automáticos de precisão usam dispositivos de controle numérico ou computadores eletrônicos para substituir total ou parcialmente várias ações de máquinas-ferramentas de uso geral ao usinar peças, como partida, sequência de usinagem, alteração da dosagem de corte, mudança da velocidade do eixo, seleção de ferramentas, início e parada do refrigerante e estacionamento. Portanto, tornos automáticos de precisão são máquinas-ferramentas equipadas com sistemas de controle numérico, que usam sinais digitais para controlar o movimento da máquina-ferramenta e seu processo de processamento. O princípio básico do controle numérico é a interpolação linear, que consiste em calcular os valores de coordenadas de vários pontos intermediários entre os pontos inicial e final do movimento da ferramenta de acordo com os requisitos da velocidade de alimentação.
Atualmente, no sistema de controle numérico de ligação multi-coordenada, o algoritmo de interpolação linear mais extenso é o algoritmo de interpolação de amostragem de dados, que é caracterizado pela operação de interpolação ser concluída em duas etapas. A primeira etapa é a interpolação grosseira, que consiste em inserir vários pontos de verificação de faca entre as conexões de um determinado ponto de verificação de faca inicial, ou seja, para cada coordenada de movimento, vários pequenos deslocamentos são usados para aproximar, e o comprimento de cada pequeno deslocamento é igual a Delta L e está relacionado à taxa de alimentação dada. A interpolação grossa é calculada apenas uma vez em cada ciclo de operação de interpolação, e o comprimento de cada pequeno deslocamento está relacionado ao Delta L e à taxa de alimentação F e período de interpolação T, ou seja, Delta L = FT. A segunda etapa é a interpolação fina, que é fazer "densificação de pontos de dados" em cada pequeno deslocamento calculado por interpolação aproximada. A interpolação grossa calcula o valor do incremento da posição das coordenadas em cada ciclo de interpolação, enquanto a interpolação fina calcula o valor do incremento da posição de amostragem e o valor do incremento da posição de instrução de saída de interpolação em cada ciclo de amostragem e, em seguida, calcula a posição de instrução de interpolação correspondente e a posição de feedback real de cada eixo de coordenadas, e compara os dois para obter o erro de seguimento. De acordo com o erro de seguimento obtido, a instrução da velocidade de alimentação do eixo correspondente é calculada e enviada para o dispositivo de acionamento. Normalmente, o período de interpolação pode ser um múltiplo inteiro do período de amostragem.