English
English Spanish
Spanish Arabic
Arabic French
French Portuguese
Portuguese Belarusian
Belarusian Japanese
Japanese Russian
Russian Malay
Malay Icelandic
Icelandic Bulgarian
Bulgarian Azerbaijani
Azerbaijani Estonian
Estonian Irish
Irish Polish
Polish Persian
Persian Boolean
Boolean Danish
Danish German
German Filipino
Filipino Finnish
Finnish Korean
Korean Dutch
Dutch Galician
Galician Catalan
Catalan Czech
Czech Croatian
Croatian Latin
Latin Latvian
Latvian Romanian
Romanian Maltese
Maltese Macedonian
Macedonian Norwegian
Norwegian Serbian
Serbian Slovak
Slovak Slovenian
Slovenian Swahili
Swahili Thai
Thai Turkish
Turkish Welsh
Welsh Urdu
Urdu Ukrainian
Ukrainian Greek
Greek Hungarian
Hungarian Italian
Italian Yiddish
Yiddish Indonesian
Indonesian Vietnamese
Vietnamese Haitian Creole
Haitian Creole Spanish Basque
Spanish Basque

Introduktion till bearbetningsegenskaperna hos automatiska precisionsvarvar
 Precision automatisk svarv är en effektiv automatiserad verktygsmaskin. Precision automatisk svarv bearbetning skiljer sig från vanliga verktygsmaskiner bearbetning. Vid bearbetning av delar på en precision automatisk svarv, olika operationer som krävs i bearbetningsprocessen (såsom start och stopp av spindeln, pendling och hastighetsförändring, matning av arbetsstycket eller verktyget, verktygsval, kylvätsketillförsel, etc.) och formen och storleken på delarna skrivs in i numeriska styrbehandlingsprogram enligt den angivna kodningsmetoden och inmatning i den numeriska styranordningen. Därefter bearbetar och beräknar den numeriska styrenheten inmatningsinformationen och styr servodrivsystemet för att samordna koordinataxelns rörelse för att förverkliga den relativa rörelsen mellan verktyget och arbetsstycket och slutföra behandlingen av delarna. När arbetsstycket som ska bearbetas byts krävs, förutom att spänna fast arbetsstycket igen och byta verktyg, endast utbytesprogrammet.
Precision automatisk svarv är en effektiv automatiserad verktygsmaskin. Precision automatisk svarv bearbetning skiljer sig från vanliga verktygsmaskiner bearbetning. Vid bearbetning av delar på en precision automatisk svarv, olika operationer som krävs i bearbetningsprocessen (såsom start och stopp av spindeln, pendling och hastighetsförändring, matning av arbetsstycket eller verktyget, verktygsval, kylvätsketillförsel, etc.) och formen och storleken på delarna skrivs in i numeriska styrbehandlingsprogram enligt den angivna kodningsmetoden och inmatning i den numeriska styranordningen. Därefter bearbetar och beräknar den numeriska styrenheten inmatningsinformationen och styr servodrivsystemet för att samordna koordinataxelns rörelse för att förverkliga den relativa rörelsen mellan verktyget och arbetsstycket och slutföra behandlingen av delarna. När arbetsstycket som ska bearbetas byts krävs, förutom att spänna fast arbetsstycket igen och byta verktyg, endast utbytesprogrammet.
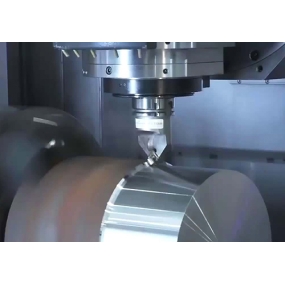
Precisionsautomatiska svarvar använder numeriska styrenheter eller elektroniska datorer för att helt eller delvis ersätta olika åtgärder av allmänna verktygsmaskiner vid bearbetning av delar, såsom start, bearbetningssekvens, ändring av skärdosering, spindelhastighetsförändring, val av verktyg, kylvätskans start och stopp och parkering. Därför är precisionsautomatiska svarvar verktygsmaskiner utrustade med numeriska styrsystem, som använder digitala signaler för att styra verktygsmaskinens rörelse och dess bearbetningsprocess. Grundprincipen för numerisk styrning är linjär interpolering, som är att beräkna koordinatvärdena för flera mellanliggande punkter mellan start- och slutpunkterna för verktygsrörelsen enligt kraven för matningshastigheten.
För närvarande, i det numeriska styrsystemet med flera koordinater, är den mest omfattande linjära interpolationsalgoritmen datasamplingsinterpoleringsalgoritmen, som kännetecknas av att interpolationsoperationen slutförs i två steg. Det första steget är grov interpolering, vilket är att infoga flera knivkontrollpunkter mellan anslutningarna till en given startknivkontrollpunkt, det vill säga för varje rörelsekoordinat används flera små förskjutningar för att approximera, och längden på varje liten förskjutning är lika med Delta L och är relaterad till den givna matningshastigheten. Grov interpolation beräknas endast en gång i varje interpolationsoperationscykel, och längden på varje liten förskjutning är relaterad till Delta L och den givna matningshastigheten F och interpolationsperioden T, det vill säga Delta L = FT. Det andra steget är fin interpolation, vilket är att göra "förtätning av datapunkter" på varje liten förskjutning beräknad genom grov interpolation. Grov interpolation beräknar koordinatpositionsinkrementvärdet i varje interpolationscykel, medan fin interpolation beräknar inkrementvärdet för samplingspositionen och inkrementvärdet för interpolationsinstruktionspositionen i varje samplingscykel, och beräknar sedan motsvarande interpolationsinstruktionsposition och den faktiska återkopplingspositionen för varje koordinataxel, och jämför de två för att erhålla följfelet. Enligt det erhållna följfelet beräknas matningshastighetsinstruktionen för motsvarande axel och matas ut till drivanordningen. Vanligtvis kan interpolationsperioden vara en heltalsmultipel av samplingsperioden.